No Products in the Cart
The Ping360 is a mechanical scanning sonar for navigation and imaging. It has a 50 meter (165 foot) range, 300 meter (984 foot) depth rating, and an open-source software interface that makes it a capable tool for ROV navigation and underwater acoustic imaging.
It’s designed primaribly to be used on the BlueROV2 and other ROVs for navigation in low-visibility water conditions, but it’s also suited for applications such as inspection, obstacle avoidance, target location and tracking, autonomous systems development, and more!

What's inside
When mounted on an ROV, the scanning sonar gives you a top-down view of the ROV’s surroundings. You can see echoes from objects like ropes, walls, dock pilings, rocks, shipwrecks, boats, fish, and any other structures or objects that reflect sound waves. With that, you have reference points to navigate from, regardless of water visibility, and you can locate important features in the water quickly.
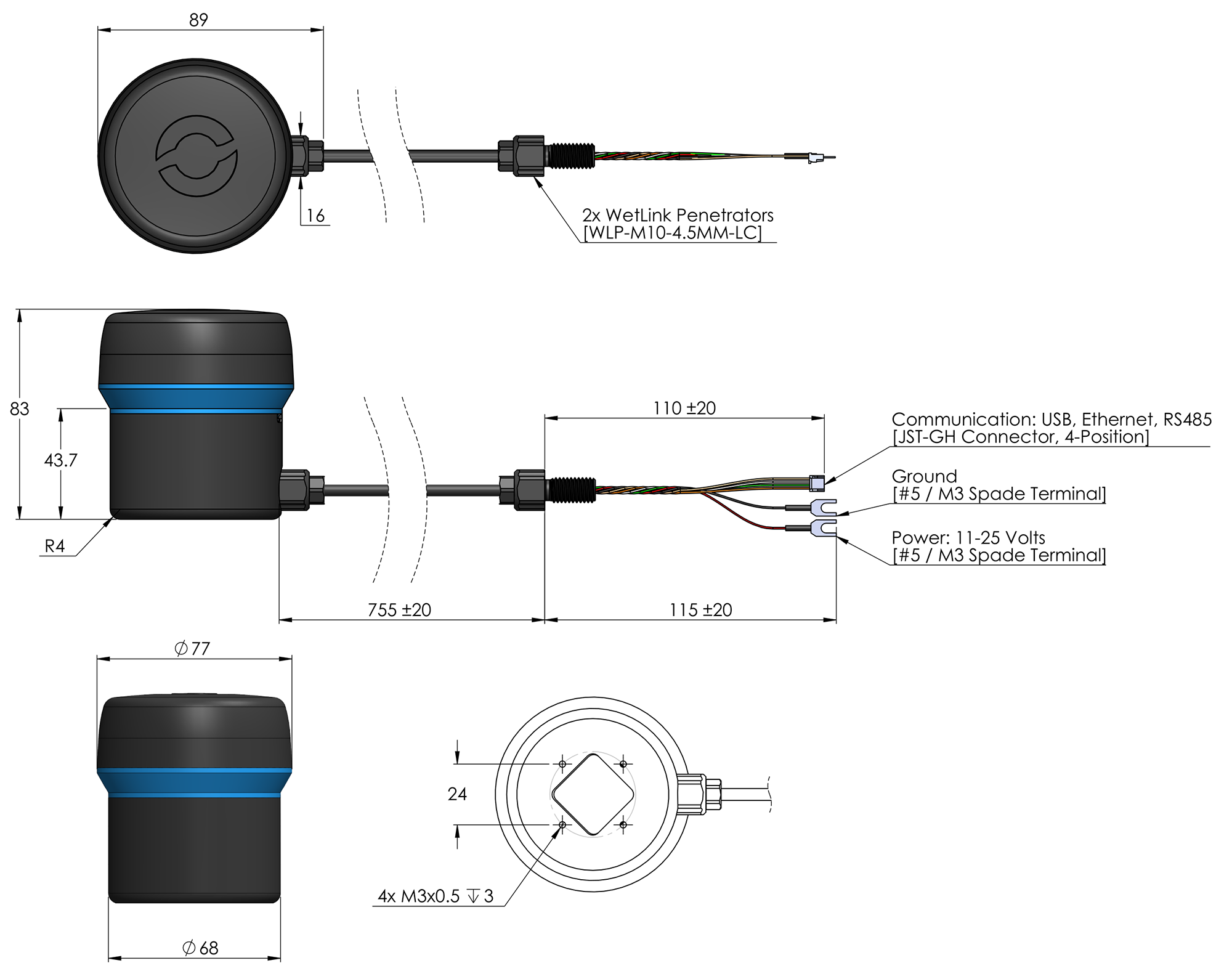
The sonar operates at an acoustic frequency of 750 kHz and has a beam width of 2 degrees horizontally and 25 degrees vertically. Electrically, it can be powered from any clean 11-25 V power source and it communicates via USB, RS485, or Ethernet.


User Interface
The Ping360 connects to the open source Ping-Viewer application for control and data display. Ping-Viewer runs on Windows, Mac, and Linux and can connect to the Ping360 through a direct connection to the computer or through the Companion web interface on the BlueROV2.+++

For those who wish to integrate the Ping360 scanning sonar into other systems and access the data directly, it communicates with a binary message format called the Ping-Protocol. We’ve have Arduino and Python libraries for the Ping-Protocol to get you up and running almost immediately.
BlueRobotics
Sensors and Sonars